Python TANGO server
This is the python Tango devices server by the ESRF team.
This server provides a main device for the standard camera control, a camera specific device for the camera configuration and a set of “plugin” devices for extra operations or just to provide some specific API for clients.
Thanks to the Lima framework, the control can be achieved through a common server and a set of software operations (Mask,Flatfield,Background,RoiCounter,PeakFinder…) on image as well. The configuration of the detector is done by the specific detector device. At ESRF we decided to develop the Tango devices only in python language which implies that all the detector C++ interfaces have been wrapped in python.
Main device: LimaCCDs
LimaCCDs is the generic device and it provides a unique interface to control any supported cameras. One can find below the commands, the attributes and the properties.
To run a LimaCCDs server you will need at least to configure the LimaCameraType property. This property is used by the LimaCCDs server to create the proper camera device. Please refers to any camera (e.g Basler) section for further information.
Property
Property name |
Mandatory |
Default value |
Description |
|---|---|---|---|
AccThresholdCallbackModule |
No |
“” |
Plugin file name which manages threshold, see acc_saturated_* attributes and the *AccSaturated* commands to activate and use this feature |
BufferMaxMemory |
No |
70 |
The maximum among of memory in percent of the available RAM that Lima is using to allocate frame buffer. |
ConfigurationFilePath |
No |
~/lima_<serv-name>.cfg |
The default configuration file path |
ConfigurationDefaultName |
No |
“default” |
Your default configuration name |
IntrumentName |
No |
“” |
The instrument name, e.g ESRF-ID02 (*) |
LimaCameraType |
Yes |
N/A |
The camera type: e.g. Maxipix |
MaxVideoFPS |
No |
30 |
Maximum value for frame-per-second |
NbProcessingThread |
No |
1 |
The max number of thread for processing. Can be used to improve the performance when more than 1 task (plugin device) is activated |
TangoEvent |
No |
False |
Activate Tango Event for counters and new images |
UserDetectorName |
No |
“” |
A user detector identifier, e.g frelon-saxs, (*) |
ImageOpMode |
No |
“HardAndSoft” |
Configure the image op mode. One of ‘HardOnly’, ‘SoftOnly’, ‘HardAndSoft’ |
(*) Properties only used to set meta-data in HDF5 saving format.
Commands
Command name |
Arg. in |
Arg. out |
Description |
|---|---|---|---|
Init |
DevVoid |
DevVoid |
Do not use |
State |
DevVoid |
DevLong |
Return the device state |
Status |
DevVoid |
DevString |
Return the device state as a string |
getAttrStringValueList |
DevString: Attribute name |
DevVarStringArray: String value list |
Return the authorized string value list for a given attribute name |
prepareAcq |
DevVoid |
DevVoid |
Prepare the camera for a new acquisition, has to be called each time a parameter is set. |
startAcq |
DevVoid |
DevVoid |
Start the acquisition |
stopAcq |
DevVoid |
DevVoid |
Stop the acquisition after current frame is acquired, and wait for all tasks to finish |
abortAcq |
DevVoid |
DevVoid |
Abort the acquisition, the current frame is lost |
setImageHeader |
DevVarStringArray: Array of string header |
DevVoid |
|
resetCommonHeader |
DevVoid |
DevVoid |
Reset the common header |
resetFrameHeaders |
DevVoid |
DevVoid |
Reset the frame headers |
getImage |
DevLong: Image number(0-N) |
DevVarCharArray: Image data |
Return the image data in raw format (char array) |
getBaseImage |
DevLong: Image number(0-N) |
DevVarCharArray: Image data |
Return the base image data in raw format (char array). Base image is the raw image before processing |
readImage |
DevLong: Image number(0-N) |
DevEncoded: Encoded image |
Return the image in encoded format of type “DATA_ARRAY” (see DevEncoded) |
readLastImage |
DevLong: Last image number(0-N) |
DevEncoded: Encoded image |
Return the last image acquired after the image number given in parameter in encoded format of type “DATA_ARRAY” (see DevEncoded) |
readImageSeq |
DevLongArray: Image number(0-N) list |
DevEncoded: Encoded image(S) |
Return a stack of images in encoded format of type “DATA_ARRAY” (see DevEncoded) |
writeImage |
DevLong: Image number(0-N) |
DevVoid |
Save manually an image |
readAccSaturatedImageCounter |
DevLong: Image number |
DevVarUShortArray: Image counter |
The image counter |
readAccSaturatedSumCounter |
DevLong: from image id |
DevVarLongArray: result |
number of result for each images,sum counter of raw image #0 of image #0,sum counter of raw image #1 of image #0,… |
setAccSaturatedMask |
DevString |
DevVoid |
Full path of mask file, use empty string (“”) to unset the mask |
closeShutterManual |
DevVoid |
DevVoid |
Only if the camera has this capability |
openShutterManual |
DevVoid |
DevVoid |
Only if the camera has this capability |
reset |
DevVoid |
DevVoid |
Reset the camera to factory setting |
getPluginDeviceNameFromType |
DevString |
DevString |
Return the device name corresponding to the passed plugin named (.e.g FlatField) |
configStore |
DevVarStringArray:config name,module1, module2, … , modulen |
DevVoid |
Store (im memory) a current config with name and for the listed modules (e.g. Acquisition, Image, RoiCounters, Saving …). See the config_available_name and config_available_module attributes for full list. |
configApply |
DevString: config name |
DevVoid |
Apply the named config |
configPop |
DevVoid |
DevVoid |
Pop the named config from the list |
configDelete |
DevVoid |
DevVoid |
Delete the named config |
configFileSave |
DevVoid |
DevVoid |
Save all the config into file (see properties for config file name) |
configFileLoad |
DevVoid |
DevVoid |
Load the configs from file |
Attributes
You will here a long list of attributes, this reflects the richness of the LIMA library. We organized them in modules which correspond to specific functions. A function module is identified by an attribute name prefix (excepted for informational attributes), for instance the Acquisition module attributes are always named acq_<attr-name>. The available modules are :
Modules |
Prefix |
|---|---|
General Information |
|
Status |
last_ and ready_ |
Acquisition |
acq_ for most of them (sorry) |
Accumulation |
acc_ |
Saving |
saving_ |
Image |
image_ |
Shutter |
shutter_ |
Debug |
debug_ |
Video |
video_ |
Shared Memory |
shared_memory_ |
Configuration |
config_ |
Buffer |
buffer_ |
Plugin |
plugin_ |
Many attributes are of type DevString and they have a fixed list of possible values (enumerations). You can get the list by calling the special command getAttrStringValueList. Because a camera cannot support some attribute values , the command getAttrStringValueList will give you the the value list for the camera. For instance the attribute video_mode supports up to 14 different video formats, but a camera can only supports few of them.
General Information
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
lima_version |
ro |
DevString |
The lima core library version number |
lima_type |
ro |
DevString |
LImA camera type: Maxipix,Pilatus,Frelon,Pco, Basler … |
camera_type |
ro |
DevString |
Like lima_type but in upper-case !! |
camera_pixelsize |
ro |
DevDouble[x,y] |
The camera pixel size in x and y dimension |
camera_model |
ro |
DevString |
Camera model return by the detector layer:.e.g. 5x1- TPX1 |
Status
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
last_base_image_ready |
ro |
DevLong |
The last base (before treatment) ready |
last_image_ready |
ro |
DevLong |
The last acquired image number, ready for reading |
last_image_saved |
ro |
DevLong |
The last saved image number |
last_image_acquired |
ro |
DevLong |
The last acquired image number |
last_counter_ready |
ro |
DevLong |
Tell which image counter is last ready |
ready_for_next_image |
ro |
DevBoolean |
True after a camera readout, otherwise false. Can be used for fast synchronisation with trigger mode (internal or external). |
ready_for_next_acq |
ro |
DevBoolean |
True after end of acquisition, otherwise false. |
user_detector_name |
rw |
DevString |
User detector name |
instrument_name |
rw |
DevString |
Intrument/beamline name |
Acquisition
LImA acquisition time
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
acq_status |
ro |
DevString |
Acquisition status: Ready, Running, Fault or Configuration |
acq_status_fault_error |
ro |
DevString |
In case of Fault state, return the error message |
acq_mode |
rw |
DevString |
|
acq_nb_frames |
rw |
DevLong |
Number of frames to be acquired, Default is 1 frame |
acq_trigger_mode |
rw |
DevString |
|
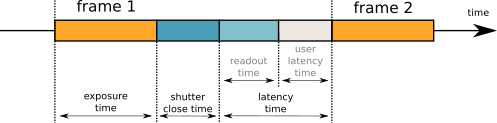
latency_time |
rw |
DevDouble |
Latency time in second between two frame acquisitions, can not be zero, the minimum time corresponds to the readout time of the detector. |
valid_ranges |
ro |
DevDouble[4] |
min exposure, max exposure, min latency, max latency |
concat_nb_frames |
rw |
DevLong |
The nb of frames to concatenate in one image |
acq_expo_time |
rw |
DevDouble |
The exposure time of the image, Default is 1 second |
Accumulation
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
acc_expotime |
ro |
DevDouble |
The effective accumulation total exposure time. |
acc_nb_frames |
ro |
DevLong |
The calculated accumulation number of frames per image. |
acc_max_expotime |
rw |
DevDouble |
The maximum exposure time per frame for accumulation |
acc_time_mode |
rw |
DevString |
|
acc_dead_time |
ro |
DevDouble |
Total accumulation dead time |
acc_live_time |
ro |
DevDouble |
Total accumulation live time which corresponds to the detector total counting time. |
acc_mode |
rw |
DevString |
Select the mode of accumulation
- STANDARD = the sum of the pixel
- THRESHOLD_BEFORE = apply a threshold specified with |
acc_offset_before |
rw |
DevLong |
Set a offset value to be substracted to each pixel value |
acc_threshold_before |
rw |
DevLong |
Set a threshold value, lower pixel values (noise) are discarded from the accumulation |
acc_out_type |
rw |
DevString |
Set the out image type afer accumulation (Bpp8, Bpp8S, Bpp16, Bpp16S, Bpp32, Bpp32S) Selecting a lower bitdepth might result in saturation. |
acc_stat_type |
rw |
DevString |
Set the accumulator/statistic applied to each pixels over the accumlation window - Sum returns the sum of the pixel intensities (Default) - Mean returns the arithmetic mean of the pixel intensities - Median returns the median of the pixel intensities Selecting a lower bitdepth might result in saturation. |
acc_saturated_active |
rw |
DevBoolean |
To activate the saturation counters (i.e. readAccSaturated commands) |
acc_saturated_cblevel |
rw |
DevLong |
Set at which level of total saturated pixels the callback plugin (if set with the AccThresholdCallbackModule property) will be called |
acc_saturated_threshold |
rw |
DevLong |
The threshold for counting saturated pixels |
Saving
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
saving_mode |
rw |
DevString |
|
saving_directory |
rw |
DevString |
The directory where to save the image files |
saving_prefix |
rw |
DevString |
The image file prefix |
saving_suffix |
rw |
DevString |
The image file suffix |
saving_next_number |
rw |
DevLong |
The image next number The full image file name is: /saving_directory/saving_prefix+sprintf(“%04d”,saving_next_number)+saving_suffix |
saving_format |
rw |
DevString |
|
saving_overwrite_policy |
rw |
DevString |
|
saving_frame_per_file |
rw |
DevLong |
Number of frames saved in each file |
saving_common_header |
rw |
DevString[] |
Common header with multiple entries |
saving_header_delimiter |
rw |
DevString[] |
The header delimiters, [0] = key header delimiter, [1] = entry header delimiter, [2] = image number header delimiter. Default : [0] = “=”, [1] = “n”, [2] = “;” |
saving_max_writing_task |
rw |
DevShort |
Set the max. tasks for saving file, default is 1 |
saving_statistics |
ro |
DevDouble[] |
Return stats: saving speed, compression ratio, compression speed and incoming speed (speed in byte/s) |
saving_statistics_history |
rw |
DevLong |
Set size of history for stats calculation, default is 16 frames |
saving_managed_mode |
rw |
DevString |
On some detectors, saving can be managed by the hardware (sdk), you can switch the mode using these attribute values: - HARDWARE, lima will not manage the saving but set the camera to do the job - SOFTWARE, (default) Lima is managing the saving |
saving_every_n_frames |
rw |
DevLong |
Save frame every N frames (experimental) |
Image
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
image_type |
ro |
DevString |
|
image_width |
ro |
DevLong |
Width size of the detector in pixel |
image_height |
ro |
DevLong |
Height size of the detector in pixel |
image_sizes |
ro |
DevULong[4] |
Signed(0-unsigned,1-signed), depth(nb bytes), width and height |
image_max_dim |
ro |
DevULong[2] |
Maximum image dimension, width and height in pixel |
image_roi |
rw |
DevLong[4] |
Region Of Interest on image, [0] = Begin X, [1] = End X, [2] Begin Y, [3] = End Y, default ROI is [0,0,0,0] (no ROI) |
image_bin |
rw |
DevLong[2] |
Binning on image, [0] = Binning factor on X, [1] = Binning factor on Y. Default binning is 1 x 1 |
image_flip |
rw |
DevBoolean[2] |
Flip on the image, [0] = flip over X axis, [1] flip over Y axis. Default flip is False x False |
image_rotation |
rw |
DevString |
Rotate the image: “0”, “90”, “180” or “270” |
Shutter
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
shutter_ctrl_is_available |
ro |
DevBoolean |
Return true if the camera has a shutter control |
shutter_mode |
rw |
DevString |
|
shutter_open_time |
rw |
DevDouble |
Delay (sec.) between the output shutter trigger and the beginning of the acquisition, if not null the shutter signal is set on before the acquisition is started. |
shutter_close_time |
rw |
DevDouble |
Delay (sec.) between the shutter trigger and the end of the acquisition, if not null the shutter signal is set on before the end of the acquisition. |
shutter_manual_state |
rw |
DevString |
To open/close manually the shutter (if Manual mode is supported, see shutter_mode) |
Debug
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
debug_module_possible |
ro |
DevString[] |
Return the list of possible debug modules |
debug_modules |
rw |
DevString[] |
|
debug_types_possible |
ro |
DevString[] |
Return the list of the possible debug types |
debug_types |
rw |
DevString[] |
|
Video
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
video_active |
rw |
DevBoolean |
Start the video mode (or not) |
video_live |
rw |
DevBoolean |
Start the video streaming (or not) |
video_exposure |
rw |
DevDouble |
The video exposure time (can be different to the acq_expo_time) |
video_gain |
rw |
DevDouble |
The video gain (if supported by the hardware) |
video_mode |
rw |
DevString |
Depending of your camera, the supported formats can be retrieve using the command getAttrStringValueList |
video_roi |
rw |
DevLong[4] |
A ROI on the video image (independent of the image_roi attribute) |
video_bin |
rw |
DevULong[2] |
A Binning on the video image (independt of the image_bin attribute) |
video_last_image |
rw |
DevEncoded |
The last video image, in DevEncoded “VIDEO_IMAGE” format, and using the video_mode set, see the DevEncoded definition VIDEO_IMAGE |
video_source |
rw |
DevString |
The source for video image, BASE_IMAGE (raw image) or LAST_IMAGE (after soft operation) Only valid with monochrome or scientific cameras |
video_last_image_counter |
rw |
DevLong64 |
The image counter |
Config
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
config_available_module |
ro |
DevString[] |
List of possible config modules, |
config_available_name |
ro |
DevString[] |
List of existing config names |
Buffers
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
buffer_max_memory |
rw |
DevShort |
The maximum among of memory in percent of the available RAM that Lima is using to allocate frame buffer. |
Plugin
Attribute name |
RW |
Type |
Description |
|---|---|---|---|
plugin_type_list |
ro |
DevString[] |
List of the available plugin type, to get one device name use instead the getPluginDeviceNameFromType command |
plugin_list |
ro |
DevString[] |
List of the available plugin as couple of type, device name |
DevEncoded
DATA_ARRAY
The DATA_ARRAY DevEncoded has been invented for special Tango client like SPEC. It is used by the readImage command. It can only embed raw data (no video data). The supported image format can be retrieve with the image_type attribute (Bpp8,Bpp8S, …, Bpp16,..) This encoded format is very generic and it supports many different type of data from scalar to image stack (see DataArrayCategory enumerate C-type). The readImage command only supports Image data array category.
The DATA_ARRAY format is composed of a fixed header followed by the raw data. The header is a C-like structure, with little-endian byte order and no alignment:
# The DATA_ARRAY definition
struct {
unsigned int magic= 0x44544159; // magic key
unsigned short version; // version, only 2 supported (since v1.9.5 - 2014)
unsigned short header_size; // size of the header
DataArrayCategory category; // data array category, see DataArrayCategory enumerate
DataArrayType data_type; // data type, see DataArrayType enumerate
unsigned short endianness; // 0-little-endian, 1-big-endian
unsigned short nb_dim; // number of dimension (0 to 5 max)e.g 2 for image
unsigned short dim[6]; // size for each dimension, e.g [width,height]
unsigned int dim_step[6]; // step size in pixel for each dimension, e.g [1,height]
unsigned int padding[2]; // 8 bytes of padding (for alignment)
} DATA_ARRAY_STRUCT;
enum DataArrayCategory {
ScalarStack = 0;
Spectrum;
Image;
SpectrumStack;
ImageStack;
};
enum DataArrayType{
DARRAY_UINT8 = 0;
DARRAY_UINT16;
DARRAY_UINT32;
DARRAY_UINT64;
DARRAY_INT8;
DARRAY_INT16;
DARRAY_INT32;
DARRAY_INT64;
DARRAY_FLOAT32;
DARRAY_FLOAT64;
};
VIDEO_IMAGE
The VIDEO_IMAGE DevEncoded has been implemented for the video_last_image attribute to return the last image. It can embed any of the supported video format depending of the video_mode attribute value.
The VIDEO_IMAGE format is composed of a fixed header followed by the data. The header is a C-like structure, with big-endian byte order and no alignment:
struct {
unsigned int magic_number = 0x5644454f;
unsigned short version; // only version 1 is supported
unsigned short image_mode; // Y8,Y16,....
long long frame_number; // the frame number (counter)
int width; // the frame width in pixel (horizontal size)
int height // the frame height in pixel (vertical size)
unsigned short endianness; // 0-little-endian, 1-big-endian
unsigned short header_size; // this header size in byte
unsigned short padding[2]; // 4 bytes of padding (for alignment)
} VIDEO_IMAGE_STRUCT;
Camera devices
Each camera has a configuration device with its own property/attribute/command lists. The camera configuration device is supposed to give you access to the “private” parameters of the detector that LIMA does not need but you may want to set. For instance some detectors provides a temperature control with set-points and/or start/stop commands for a auxillary cooling system.
For more details about the camera device interface, please have a look on the following sections:
Plugin devices: software operation and extra interfaces
User-defined software plugins can be used to execute arbitrary image-based operations. An entry point in the control layer completely exports the ProcessLib functionality, allowing an external code to be called on every frame. The software operation can be implemented in C++ or Python.
The software operations on image are embedded into individual Tango devices and are available in the plugins/ directory. They are automatically exported by the LimaCCDs server.
- The software operations are of two types, Sink or Link :
Link operation is supposed to modify the frame data, so it gets the frame data as input parameter and it will return a “corrected” image (e.g. Mask/Flatfield/BackgroundSubstraction).
Sink operation is taken the frame data as input parameter to apply some software operation in order to return new data like statistics, peak positions, alarm on saturation … etc.
In addition to sink/link plugin device, a plugin can just be implemented to provide/export a subset of the Lima interface or a legacy interface for some specific client applications (e.g SPEC, LimaTacoCCD plugin).
Today there are about 8 standard plugin devices:
BackgroundSubstraction : link operation, to correct the frames with a background image (substraction)
FlatField: link operation to correct the frames with a flatfield image (divide + option normalisation)
Mask: link operation to mask pixels. Very useful if some pixel are not working properly and if you want to set then to a fix value or to zero.
MemCached: sink operation to publish images to a memcached server.
PeakFinder: thanks to Teresa Numez from DESY, a sink operation which can detect diffraction peaks.
Roi2Spectrum: sink operation to apply ROI spectrum on the frames. You can define more than one spectra with ROI coordinates and by specifying in which direction you need to bin the values, vertical or horizontal.
RoiCounter: sink operation to get calculating statistics on image regions.
RoiCollection: sink operation to generate a spectrum of Roi integration counters.
LimaTacoCCD: extra interface for TACO clients, it only provides commands (TACO does not have attribute !), it is still used at ESRF for SPEC.
LiveViewer: extra interface to provide a live view of the last acquired image, can be used from atkpanel.
If you need to implement your own plugin device we can provide you some example codes, use the mailing-list lima@esrf.fr to get help.